人類未踏の地に挑む 自律型火星探査ロボットTechnology Hunting『EngGARAGE*04』

慶應義塾大学 理工学部 機械工学科 専任講師 石上玄也さん
20XX 年、人類が月や惑星などの太陽系にまったく新しい文明圏を作り出し、衣食住を営む。そんな未来を実現する ために、人間が立ち入ることが困難な未知の環境である月惑星表面を自律的に探査するロボットの開発が進行中だ。
宇宙探査のキーテクノロジーは自律移動
大学生時代からフィールドロボティクスを専門に、 MIT、JAXA という宇宙工学分野の第一線を渡って きた石上玄也さん。現在は慶大・理工学部100 周年 の2039 年を目標に、「月もしくは火星に探査ロボット (ローバー)を送りこむ」という目標を掲げて研究に 取り組んでいる。
現在、石上さんが進めているのは宇宙での探査活動 を効率よく正確に行うため、高い走行性能を有し、自 律的に探査を行うロボティクス技術の研究開発だ。高 度な知能をもったロボットを月惑星表面に送り込む ことができれば、与えられた探査目標地点に向かって、ロボット自身で環境を把握し、岩やクレータなど の障害物を認識しながら安全な経路に沿って自動的に 移動することが可能となる。さらに目的地点に到達し たら、興味深いサンプルを採取することまで自律的に 行うのだ。「未知の環境において自律移動するロボッ トは、月惑星探査におけるキーテクノロジーとなりま す。」と石上さんは言う。
幅広いテーマ設定が結果を生み出す
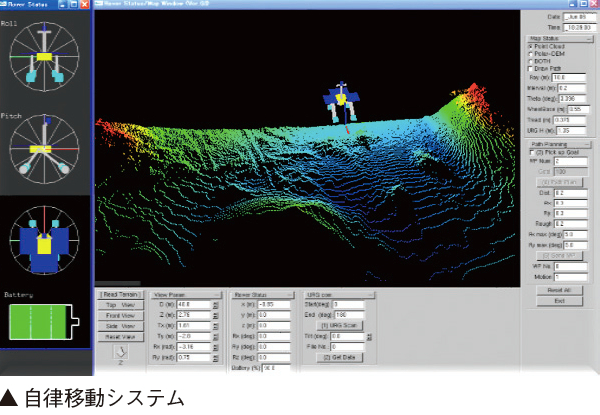
開発のポイントは走行力学と自律移動システム。砂 地や岩石の散在するオフロードでの走行性能の向上を 目指し、土と機械の接触相互作用に関するテラメカニ クスにもとづいたロボットの走行力学解析を行っている。未知環境においてロボットがどう動作するかとい うことを実験と数値シミュレーションで解き明かそう というのだ。また、未知の環境下において、予め障害 物の位置を把握することは不可能であるため、そう いった障害物をカメラやレーザーでとらえ、障害物ま での距離を計算し、得られた3 次元の距離データや環 境情報をもとにロボット自身が判断して走行する自律 移動システムも開発している。
これらのテーマの他にも車輪・サスペンション開発 や、ロボットアームのようなマニピュレーションやロボッ ト用発電システムの開発など、ローバーの移動に関わる 様々な研究テーマを扱う。「力学にも注目しつつ、自律 移動という分野にも乗り出しているところが特徴かもし れません。ロボットは統合的な技術なので、一つの学問 に固執するのではなく、ハードウェアもソフトウェアも 幅広い視野でやる必要があると考えています」。
火星で生命体を見つけるために
石上さんは現在、JAXA が主導する火星探査計画に 参画しており、その中でも,「火星に生命は存在したの か,あるいは今も存在しているのか?」という長年に渡 り議論され続けている人類のミッションに挑戦してい る。同計画のメンバーらは、従来の検出感度を飛躍的に 向上させる生命探査装置を開発中であり、高い走破性 能を有するローバーにこの装置を搭載して、生命の痕 跡を探査するミッションを検討している。特に石上さん は、これまでのロボット研究開発の知見を生かして、高 度な走破性能・自律機能を有したローバーのシステム 検討に携わっている。過去米国によって行われた7 回 の着陸探査ミッションは、全て類似した環境であったた め、生命存在の可能性に関する知見はごく限定的であっ た。流水地形やメタン放出の疑われる泥火山地形など、 生命発見に最も効率がよいと考えられる場所は、いまだ 前人未踏の場所なのである。新型生命検出装置を備え、 こうした場所に降り立って生命探査を行えるローバーを 開発することは、世界に先駆けて地球外生命体の発見 を行う大きなチャレンジであり、人類の未来の生活に大 きな変化をもたらす1 歩となるだろう。

慶應義塾大学 理工学部 機械工学科
石上研究室ホームページ
http://www.srg.mech.keio.ac.jp