姿勢制御技術からマルチコプ ターの可能性を広げる 三輪昌史
徳島大学 大学院ソシオテクノサイエンス研究部 准教授 三輪昌史さん
世界的に注目が集まるマルチコプターだが、日本での研究事例はまだまだ少ない。そんな中で、長年マルチコプターの研究を行っているのが徳島大学の三輪昌史さんだ。マルチコプターが当たり前になる社会を目指して日夜研究を続けている。
マルチコプターを利用した空中台車
少子高齢化社会が進み、マルチコプターは次世代の運輸技術として注目されている。大空をマルチコプターが駆け巡り、各家に荷物を届けていく。そんなイメージを持つ人が多い中で、三輪さんが目をつけたのは短距離輸送だ。マルチコプターの上に荷物を載せ、目的の方向にマルチコプターを押し出せば、荷物が届く。山道や水上、砂地など、これまで台車が使えなかった不整地で物を輸送する新しい方法として活用しようというものだ。現状の技術では、キャタピラ型の車両を使っているものの、その使用条件はなかなか厳しい。傾斜地の場合は傾斜度が30度以内であること、溝がある場合は車両長さに比べて溝が十分短いこと、河川の場合はキャタピラ部より上が水上に出るような浅い河川に限られることなど、まだまだ不整地での輸送には課題がある。また、長距離輸送の運用では、バッテリーや安全面など実現までの課題は多いが、短距離に限定し、地上からの浮上高度を人の高さほどに抑えることで、安全面での課題は確実に少なくなる。「空を飛ぶ」というマルチコプターの既成概念に囚われない発想が新しい用途を生み出した。
押して動かす制御技術
三輪さんの研究の強みは、姿勢制御技術にある。既存のマルチコプターの姿勢制御は、4つのプロペラの回転数を変えることで、高度・機体の傾き・機体方向をコントロールし、機体の姿勢を傾けることで移動する。操作方法も複雑なため空中に静止させるだけでも難しく誰でも安全に運用できるわけではない。そこで三輪さんは、重力バランス操縦での直観的な操作方法を直接操作へ応用した。それによりマルチコプターが押された方向に移動し、設定した距離や時間で止まるようプログラムを組むことができるようになった。直接マルチコプターを手で押せるようにプロペラガードを取り付け、荷台部分に圧力センサを取り付けてスイッチの役割を与えることで、荷台にものが置かれ、マルチコプターを押すと動くような仕組みを開発した。実験では300gの荷物を運ぶことに成功し、来年には2kg程度のものまで運べるようにしたいと考えている。
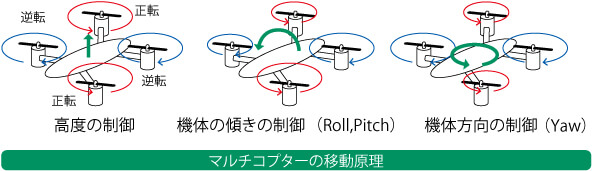
マルチコプターの移動原理
より直感的な操作性を求めて
空中台車に応用する、新たなアイデアも平行して研究している。「手で持ったマルチコプターの模型を動かすと、空中に浮いているマルチコプターが同じように動く。そんな制御の仕組みが作れるのではと思っています」。三輪さんはWiiリモコンを姿勢制御系に組み込み、コントローラーとして使えるようなシステムも開発している。Wiiリモコンの持つX軸、Y軸、Z軸に対応した3軸の加速度センサとBluetoothで、Wiiリモコンの姿勢角をマルチコプターの姿勢角の目標値として送る、という構成だ。この技術は近い将来に空中台車に応用し、より直感的な操作ができるようにしたいのだという。
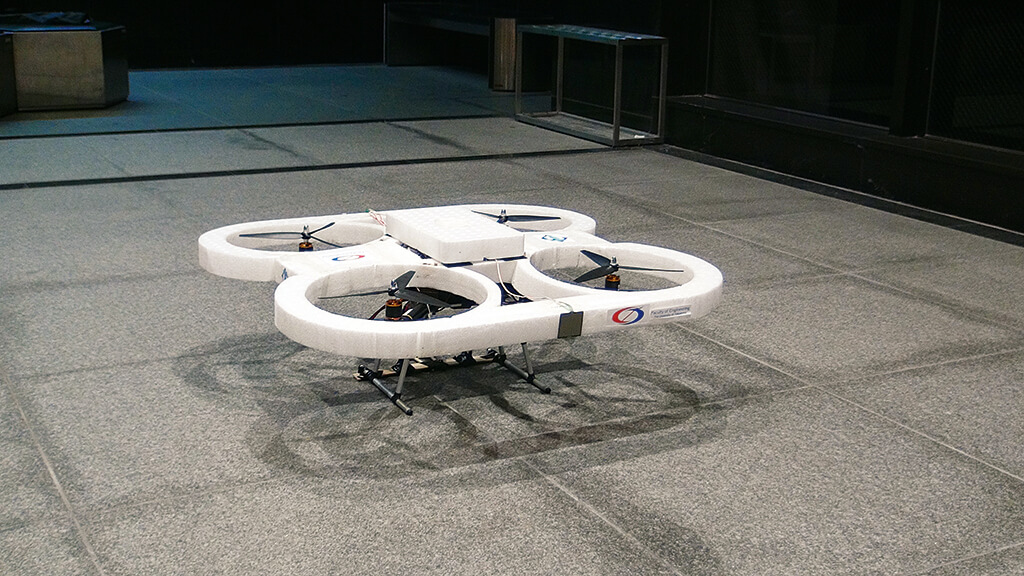
空中台車
飛行型パーソナルモビリティがある、未来
リバネスが開催した第2回テックプラングランプリでは、重心バランスでの制御を活用した飛行型パーソナルモビリティを提案した。「マルチコプターに乗り、重心移動で機体を操作できると自分で飛んでいる気になるはず。マルチコプターのサイズを大きくすれば理論的には実現できます」と三輪さんは目を輝かせながら語る。「有人飛行を目的としたヘリコプターと、無人飛行を目的としたマルチコプターは、そもそもコンセプトが違う。例えば今の航空機は、すでにパイロットは乗っているだけですべての操縦を機械が行うことはできると言われているが、安全性などの理由で絶対に人が操縦します。でも、無人飛行を目的としたマルチコプターを改良して人が乗れるようにしたら、人が操縦しなければならない、とはならないはず。そうしたら、特別な訓練なしに人が空を飛べる世界が実現できるのではないかと思っています」。多くの人々がマルチコプターに期待する用途とはまったく違う未来を三輪さんは見据えている。

飛行型パーソナルモビリティのモデル