か、確実に進化している!ついに二足歩行ロボットが綱渡り
物理学とロボティクスの共演。素晴らしい進化を遂げています。
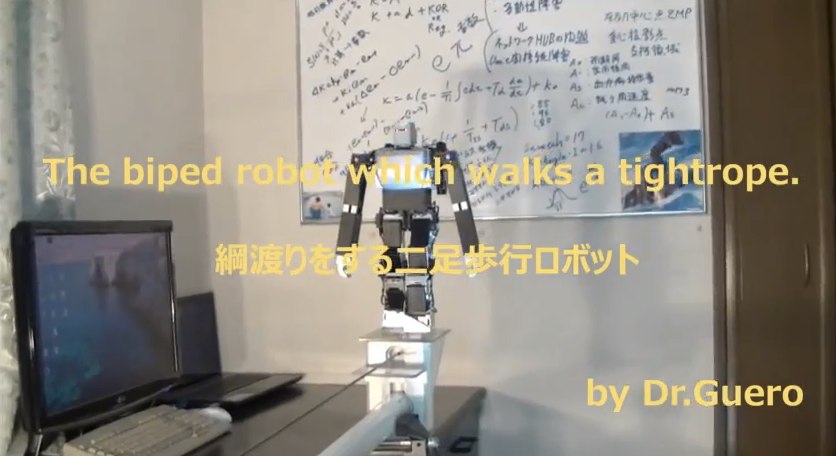
YouTubeで、むかしからウォッチしているDr.Gueroさんの新しい作品が登場。PRIMER-V4と呼ばれるこのバージョンでは、ついに二足歩行ロボットが綱渡りをしています。
小型二足歩行ロボットに綱渡りをさせてみました。 一見、腕の慣性モーメントだけでバランスを取っているように 見えますが実際には(腕の回転角が小さすぎそれだけでは十分な 反動トルクが得られませんので)腕を少し下げその振りによる 反動(ロボット座標上の重心移動で生じるロープ支点の反作用) なども利用しています。
ここに見られる通り、どのようにバランスを取っているのかというのは、物理学的な思考の賜物だと言えるでしょう。
気になるのはこれですね
サーボ駆動の最初と最後を急峻な制御ではなく、ある関数を適用して滑らかなカーブにしているためだと思います。
どんな関数で動いているのだろう!!
三角関数が現れたあたりから数学が苦手になる人が少なからずいますが、三角関数や物理学の基本法則がわかっているだけで、世界が広がるのも事実です。CGの世界の物理エンジンなども同様ですね。
気になるDr.Guero氏のホームページはこちらです。過去の作品も見られますので要チェック!
AI & Robot
サーボ駆動の最初と最後を急峻な制御ではなく、ある関数を適用して滑らかなカーブにしているためだと思います。 …
