未来の沖合養殖を支える牧魚ロボット構想 近藤逸人
人間が容易には立ち入れない過酷な環境、水中もまたロボットが活躍するに相応しい場所といえる。防錆、防水、耐圧といった陸上とは異なる多くの技術課題があり、研究開発が難しい領域であるが、近年の急速な技術発展、様々な分野融合により、まさにこれからが楽しみな「ブルーオーシャン」のひとつといえるだろう。海洋ロボットの研究を行う東京海洋大学海洋工学部近藤逸人准教授の構想では、その用途は沖合養殖にまで広がっている。
自律型水中ロボットだからできること
近藤研究室で取り組む自律型水中ロボット(Auto-nomous Underwater Vehicle;AUV)は、ケーブル等でつなぐことなく、内蔵電源やGPS等のセンサーを搭載して完全に自律した活動が可能だ。AUVには、ハイビジョンカメラや高解像度のデジタルカメラなど海中環境の観測が可能な機器が搭載されている。水中音響カメラを使えば、夜間や濁った状態においても、水中の様子を捉えることができる。また、顕微鏡を備えれば、海洋微生物分布の調査が可能になる。近年においては、生物分布などのマッピングにより、防波堤建設や、ガスハイドレードなどの海洋資源開発による環境影響評価に活用され始めている。完全自動で広範な海域のデータを収集できるAUVの強みが活きる分野だ。
刺激応答を観測する
近藤准教授らのAUVは、データを収集するだけでなく外部に刺激を与えることも可能である。センサー同様、アイデア次第で大きく広がる新領域だ。自発給餌システムにおいては、AUVを追尾してくる魚が加速度センサーにつながった疑似餌を捕食しようとしたときの刺激で一定量の練り餌を水中に放出することができる。実際の自発給餌の映像を見ると、AUVを追いかけて魚群が動く様は、羊の群れを率いる羊飼いさながらの様子である。LED光刺激においては、マダイやティラピアが色を区別して認識し、特定の色に対して反応することを明らかにした。しかし、なぜ特定の色に反応するのかなどはわかっておらず、専門家との協働による詳しい研究が待たれる。
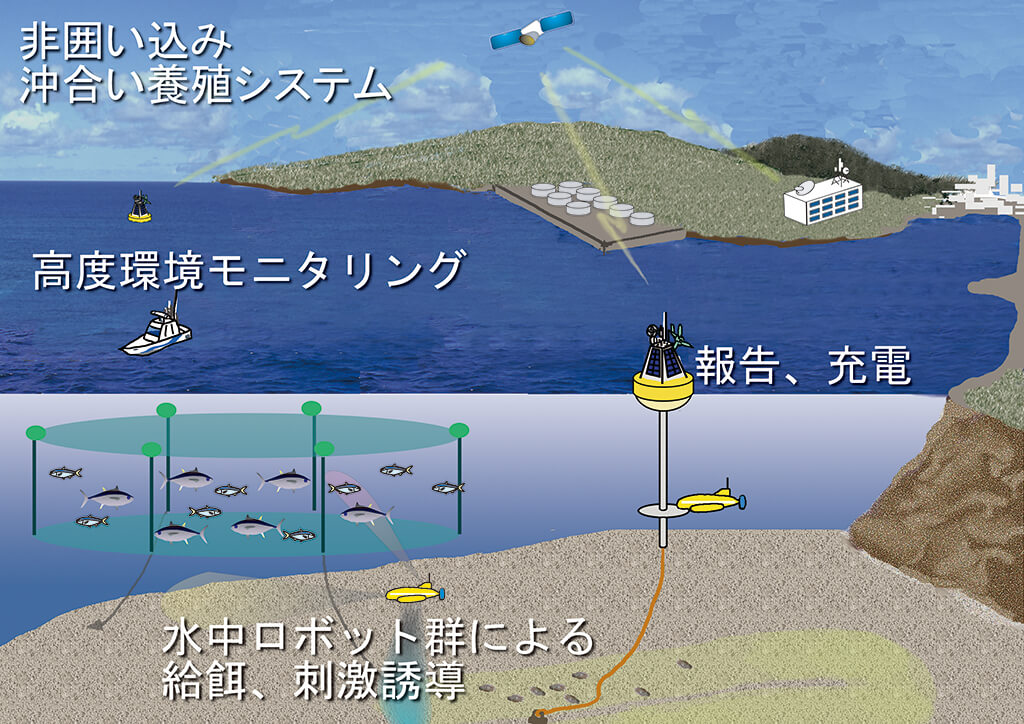
AUVが描く沖合養殖の未来構想
異分野連携が広げる海洋ロボットの可能性
AUVを用いた魚類に対する刺激や観測実験により見いだされた新たな発見は、その分野の専門家と一緒に研究することで、さらに意味のある成果や研究の発展をうむだろうと期待される。またそういった専門家が有する知見を活かし、例えば魚類の生体機能を模倣したシステムを取り入れることで、AUVはさらなる進化を遂げるに違いない。今、近藤准教授らが描くひとつの構想は、このような異分野との融合の先に実現する沖合養殖でのAUV活用だ。沖合養殖は、沿岸の海面養殖に比べて環境負荷は少ないが、その養殖環境の構築や管理が困難といった課題がある。異分野との融合領域でもあるAUVの自律制御や外部刺激システムの開発の先に、海洋ロボットが牧羊犬のように魚群を操り、沖合で囲いを使わずに養殖を実現する、そんな未来を描いている。