ついにロボットアームが稼働のフェーズへ もりもり分析だ!火星探査機キュリオシティ
しかし、かっこいい…
今は、この2.1mもあるロボットアームが正常に動くかどうかのテスト中だ。
その為に、平らな場所を探す必要があったのだと、JPLのマイケルワトキンス氏は言う。

キュリオシティのロボットアームはこんなふうに、本体の前面にくっついている。
5つのジョイントで構成されているのは、可動範囲を効率的に広げるためだろう。

ロボットアームの先にくっついているツール群がこれ。
ドリルは、岩の内部をサンプリングするために使われる
α粒子X線分光計
火星の岩をすくいあげ、回収するのがCHIMRA
DRTはホコリを取り除くシステム
ハンドレンズイメージャー(近接したサンプルの画像を送信するものかな?)

拡大図がこちら。
サンプルの分析がこの部分で進むんですね。
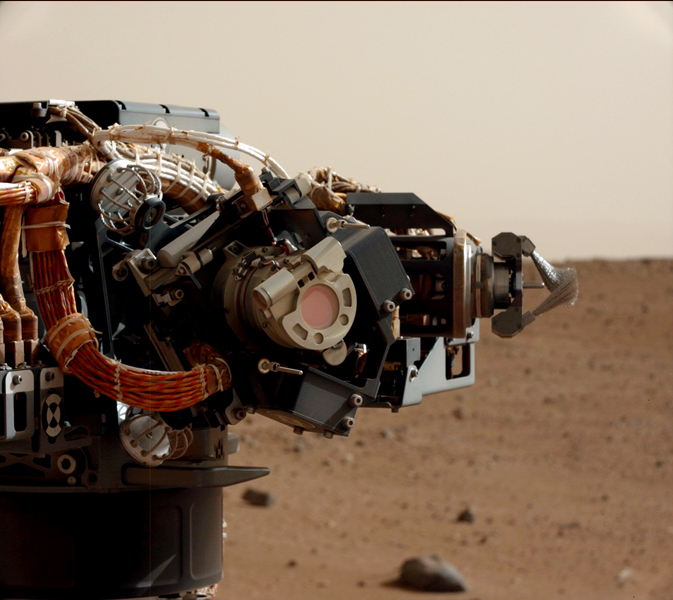
ロボットアーム付近は精密機器の塊。動作チェックに時間がかかるというのも頷けます。