da Vinciを超える 手術支援ロボット リバーフィールド株式会社
現代の外科手術が抱える大きな課題は、外科医個人の力量に因ってクオリティが左右されること。
リバーフィールドでは、誰が施術しても同じ結果になる「手術の標準化」を目指し、空気圧駆動という新しいコンセプトの手術支援ロボットを開発している。
最高峰との呼び名が高いda Vinci(ダ・ヴィンチ)にどんな戦いを挑むのか。
手術支援ロボットの普及に向けて
人間の手だけでは難しい手術をより正確に、より簡便に行える手術支援ロボット。
30年ほど前から着想されていた革新的なアイデアは、アクチュエータの小型化やセンサ、制御技術などの要素技術が高度化したことで現実のものとなった。
しかし、世界でも商用化につながっている事例はまだ少ない。
商用化の事例としては内視鏡手術支援ロボットの代表格といえるda Vinciや人工股関節置換術を支援するロボドックがあげられるが、限られた医療機関にしか手が出せない高価格帯であったり、設置する場所を選ぶほど大型化しているなどの課題を持っている。
また、臓器を触った感触、手術糸を引っ張った感覚が伝わらないなどの課題も残されており、術者は視覚に頼らざるを得ない。
リバーフィールドが開発する手術支援ロボットは、これらの課題を一挙に解決する斬新なコンセプトと高い技術力を備えている。
アナログはデジタルより強し
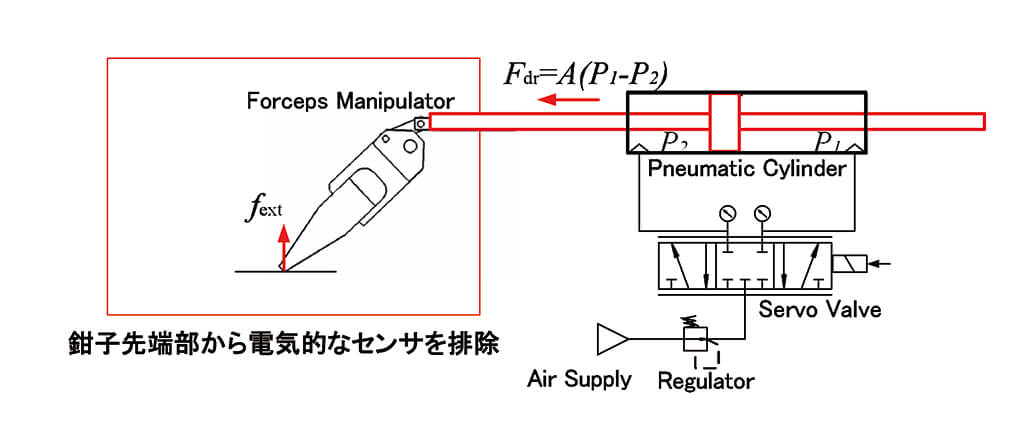
最大の特徴は、空気圧を用いた計測制御技術だ。
力センサを用いることなく、手術器具の先端で患部に触れたときの接触力を、手術器具の根幹部に埋めこんだ空気圧アクチュエーターの差圧から推定することができる。
これまで空気圧では大まかな制御しかできないといわれていたが、エアーコンプレッサーの流量を微細に調整することで、0.1mmレベルの制御を実現した。
触感が術者にフィードバックされる力覚呈示機能を有するため、目視で判断するda Vinciよりも直感的で安全性の高いシステムを提供することが可能となる。
さらに、手術器具を掴んだり患部を挟んだりする動作にも、空気圧によるピストンの動きを応用し、ロボットの構造をよりシンプルにすることで、小型軽量化と低価格化をはかっている。
“センサレスでセンシングする”というアナログの新流に主眼をおき、滅菌洗浄やノイズを発生する電気機器と同じ環境におかれても、壊れにくいところにも強みがある。

ロボットと術者が一体化する低侵襲手術
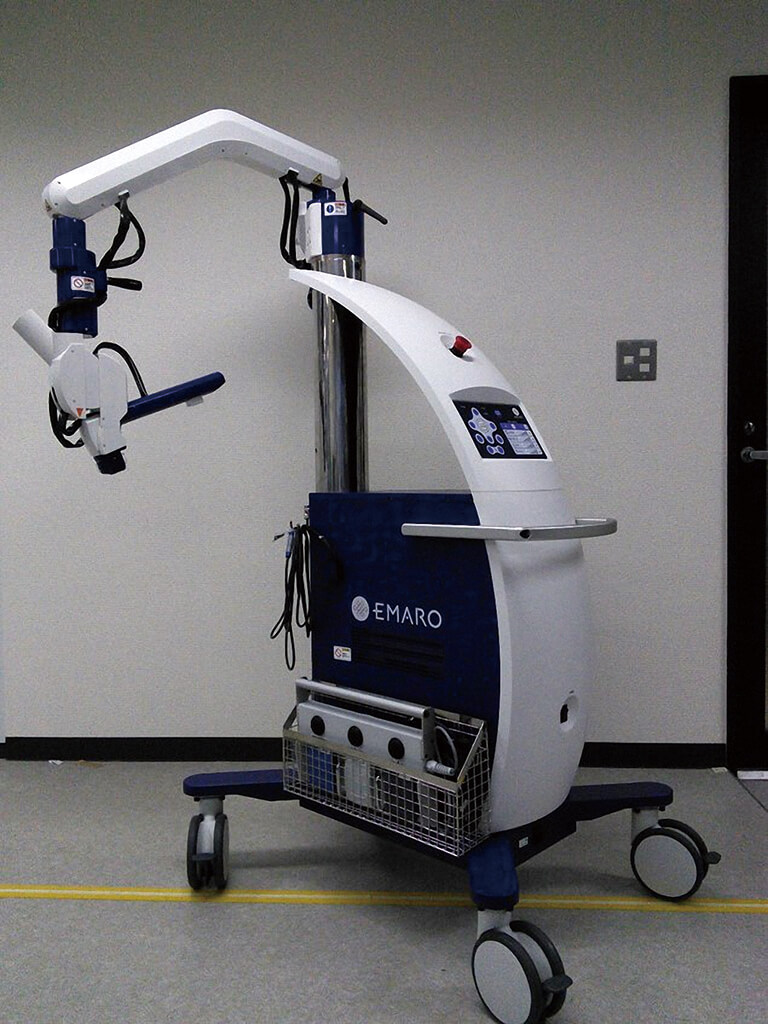 同社はファーストプロダクトとして、内視鏡カメラと連動した内視鏡操作システム「EMARO(エマロ)」を開発し、今夏から医療関連製品メーカーであるホギメディカルを通じて販売を開始した。
同社はファーストプロダクトとして、内視鏡カメラと連動した内視鏡操作システム「EMARO(エマロ)」を開発し、今夏から医療関連製品メーカーであるホギメディカルを通じて販売を開始した。
内視鏡外科手術は、痛みが少ない低侵襲性で入院期間が短く、患者さんへの負担が大幅に軽減されるため、年々右肩上がりに手術件数が増加している。
しかし、従来の内視鏡手術では、スコピストと呼ばれる医師が内視鏡カメラを操作して執刀医の目の役割を担うが、執刀医との円滑な意思疎通や手ぶれが大きな課題となっている。
EMAROは、スコピストの代わりに、空気圧駆動のロボットアームが内視鏡を保持し、執刀医の頭部に装着したセンサの動きとカメラを連動させて、見たい方向にカメラを動かせるしくみになっている。
空気圧駆動と頭部センサの組み合わせにより、直感的かつ一体感のある操作性を生み出すことに成功したのだ。
医療環境を飛躍的に向上させるリバーフィールドの技術力。
その勢いは手術支援ロボットにとどまらず、人間と協調するあらゆる機械に応用できる可能性を秘めている。